
Продукти от категория
- FM трансмитер
- 0-50w 50w-1000w 2kw-10kw 10kw +
- TV предавател
- 0-50w 50-1kw 2kw-10kw
- FM антена
- TV Антена
- Антена за аксесоари
- кабел Съединител Мощност Splitter Dummy Заредете
- RF Transistor
- Захранване
- Аудио УРЕДИ
- DTV Front End техника
- Link System
- STL система система Микровълнова Link
- FM радио
- електромера
- Други продукти
- Специален за коронавирус
Продукти Етикети
Fmuser сайтове
- es.fmuser.net
- it.fmuser.net
- fr.fmuser.net
- de.fmuser.net
- af.fmuser.net -> африкаанс
- sq.fmuser.net -> албански
- ar.fmuser.net -> арабски
- hy.fmuser.net -> Арменски
- az.fmuser.net -> азербайджански
- eu.fmuser.net -> баски
- be.fmuser.net -> белоруски
- bg.fmuser.net -> Български
- ca.fmuser.net -> каталунски
- zh-CN.fmuser.net -> китайски (опростен)
- zh-TW.fmuser.net -> Китайски (традиционен)
- hr.fmuser.net -> хърватски
- cs.fmuser.net -> чешки
- da.fmuser.net -> датски
- nl.fmuser.net -> Холандски
- et.fmuser.net -> естонски
- tl.fmuser.net -> филипински
- fi.fmuser.net -> финландски
- fr.fmuser.net -> Френски
- gl.fmuser.net -> галисийски
- ka.fmuser.net -> грузински
- de.fmuser.net -> немски
- el.fmuser.net -> Гръцки
- ht.fmuser.net -> хаитянски креолски
- iw.fmuser.net -> иврит
- hi.fmuser.net -> хинди
- hu.fmuser.net -> Унгарски
- is.fmuser.net -> исландски
- id.fmuser.net -> индонезийски
- ga.fmuser.net -> ирландски
- it.fmuser.net -> Italian
- ja.fmuser.net -> японски
- ko.fmuser.net -> корейски
- lv.fmuser.net -> латвийски
- lt.fmuser.net -> Литовски
- mk.fmuser.net -> македонски
- ms.fmuser.net -> малайски
- mt.fmuser.net -> Малтийски
- no.fmuser.net -> Norwegian
- fa.fmuser.net -> персийски
- pl.fmuser.net -> полски
- pt.fmuser.net -> португалски
- ro.fmuser.net -> Romanian
- ru.fmuser.net -> руски
- sr.fmuser.net -> сръбски
- sk.fmuser.net -> словашки
- sl.fmuser.net -> Словенски
- es.fmuser.net -> испански
- sw.fmuser.net -> суахили
- sv.fmuser.net -> шведски
- th.fmuser.net -> Thai
- tr.fmuser.net -> турски
- uk.fmuser.net -> украински
- ur.fmuser.net -> урду
- vi.fmuser.net -> Виетнамски
- cy.fmuser.net -> уелски
- yi.fmuser.net -> Идиш
Разлика между абсолютните и инкрементните енкодери?
В тази статия ще обсъдим различните видове енкодери и кой енкодер може да се използва за коя функция.
В предишен урок обсъдихме какво е Encoder и как може да бъде реализиран във вашето приложение. В тази статия ще обсъдим разликата между кодерите Absolute и Incremental и кой може да се използва за коя функция.
Видове и технологии на енкодера
Има много видове енкодери, но те по същество попадат в две основни сензорни техники. Те са:
- Линейни
- Ротационен
В рамките на тези категории има различни видове измервания на енкодера като:
- Абсолютен
- Инкрементален
Съществуват и различни електромеханични технологии като:
- Магнитни
- Оптичен
- индуктивен
- Капацитивен
- Лазер
Има много информация относно Encoders и може да ви се стори трудно да увиете главата си.
Описания като въртящи се или линейни, оптични и магнитни, абсолютни и постепенни.
Докосваме се до няколко основи, за да ви помогнем да разберете какво е това и защо.
Нека първо да разбием малко тези категории и да обясним няколко от многото конфигурации.
1. Линеен енкодер
Първо, Linear Encoder използва датчик за измерване на разстоянието между две точки. Тези енкодери могат да използват прът или кабел, който се провежда между датчика на енкодера и обекта, който ще бъде измерен за движение.
Докато обектът се движи, данните на преобразувателя, събрани от пръта или кабела, създават изходен сигнал, който е линеен към движението на обекта.
Докато се измерва разстоянието, линеен енкодер използва тази информация, за да определи позицията на обекта.
Пример за използване на линеен енкодер е за фреза с ЦПУ, където се изискват прецизни измервания на движението за точност при производството.
Линейните енкодери могат да бъдат „абсолютни“ или „инкрементални“. Ще се спрем на абсолютните и инкременталните измервания малко по-късно в тази статия.
2. Ротационен (вал) енкодер
Ротационен енкодер събира данни и предоставя обратна връзка въз основа на въртенето на обект или с други думи въртящо се устройство.
Ротационните енкодери понякога се наричат „Енкодери на вала“. Този тип енкодер може да преобразува ъгловото положение или движение на обекта въз основа на въртенето на вала, в зависимост от използвания тип измерване.
„Абсолютните ротационни енкодери“ могат да измерват „ъглови“ позиции, докато „инкрементните ротационни енкодери“ могат да измерват неща като разстояние, скорост и положение.
Ротационните енкодери се използват в голямо разнообразие от области на приложение като компютърни устройства за въвеждане като мишки и тракболи, както и роботика.
Ротационните или валовите енкодери, както беше посочено по-горе, могат да бъдат „абсолютни“ или „постепенни“.
3. Енкодер за позиция
Следващият енкодер, който е енкодер „Позиция“, се използва за определяне на механичното положение на даден обект. Това механично положение е „абсолютно положение“.
Те могат също да бъдат използвани за определяне на промяна в позицията между енкодера и обекта. Промяната в позицията по отношение на обекта и енкодера би била постепенна промяна.
Позиционните енкодери се използват широко в индустриалната арена за определяне позицията на инструментална екипировка и многоосно позициониране.
Енкодерът за позиция може също да бъде абсолютен или увеличен.
4. Оптичен енкодер
"Оптични" енкодери интерпретират данни в светлинни импулси, които след това могат да бъдат използвани за определяне на неща като позиция, посока и скорост.
Валът върти диск с непрозрачни сегменти, които представляват определен модел. Тези енкодери могат да определят движението на даден обект за приложения „въртящи се“ или „вала“, като същевременно определят точното положение в „линейните“ функции.
Оптичните енкодери се използват в различни приложения като принтери, фрезови машини с ЦПУ и роботика.
Отново тези енкодери могат да бъдат абсолютни или увеличени.
След като обясните основните групи, може да видите модел.
Всички енкодери по принцип правят едно и също нещо, произвеждат електрически сигнал, който след това може да бъде преведен в положение, скорост, ъгъл и т.н.
Абсолютен енкодер срещу инкрементален енкодер
Сега, след като сме разделили основните групи, нека да обсъдим разликата между абсолютните и инкременталните измервания.
За да обсъдим разликата между абсолютните и инкременталните измервания, ще използваме типа Rotary Encoder като пример.
В ротационен „Абсолютен“ енкодер за измерване се използва прорезен диск на вал във връзка със стационарно устройство за захващане. Когато валът се завърти, се получава уникален модел на код. Това означава, че всяко положение на вала има модел и този модел се използва за определяне на точното положение.
Ако захранването на енкодера е загубено и валът е завъртян, когато захранването е възобновено, енкодерът ще запише абсолютната позиция, както е показано от уникалния модел, предаден от диска и получен от пикапа.
Този тип измервания са предпочитани в приложения, изискващи голяма степен на сигурност, например когато безопасността е от първостепенно значение. Тъй като енкодерът знае, по всяко време, своето окончателно положение въз основа на уникалния произведен модел.
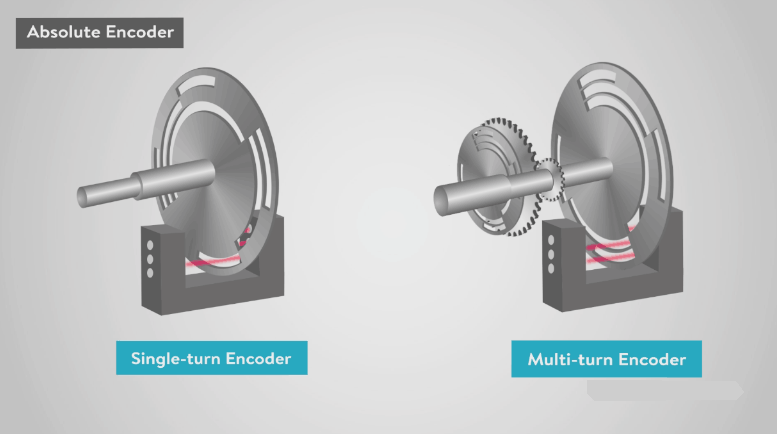
Абсолютни измервателни енкодери могат да бъдат
- Еднократен завой
or
- Мулти оборот
Кодиращите устройства с едно завъртане се използват за измерване на къси разстояния, докато „многооборотният“ ще бъде по-подходящ за по-дълги разстояния и по-сложни изисквания за позициониране.
За енкодерите за постепенно измерване изходният сигнал се създава всеки път, когато валът върти измерено количество. След това този изходен сигнал се интерпретира въз основа на броя на сигналите на оборот.
Инкрементният енкодер започва да брои нула при включване. За разлика от абсолютния енкодер, няма предпазни мерки по отношение на позицията.
Тъй като инкременталният енкодер започва броя на нула при стартиране или прекъсване на захранването, е необходимо да се определи референтна точка за всички задачи, изискващи позициониране.
Енкодери при броене на приложения
В предишната статия, когато описва използването на енкодер за целите на броенето, този пример е добър пример за инкрементален енкодер.
Да приемем, че захранването не е било прекъснато и сте включили конвейера и сте поставили машината в режим на настройка.
Докато кодерът се завърта, контролерът получава броене. Да приемем, че диапазонът на броене е от 0 до 10000.
Това е инкрементален енкодер, така че абсолютната позиция не се знае, просто знаем, че пълната оборота на вала регистрира брой 10000.
Ще поставим обекта върху конвейера и веднага щом входният сензор за фото-око засече обекта, текущият брой на енкодера се улавя. Да речем, че числото е 5232.
След това ще уловим броя с обекта, който излиза и ще бъде открит от изходното фото око. Ще кажем, че числото е 6311. Така че за да определим броя на пълния ход, ще извадим 5232 от 6311 и ще определим, че пътуването на обекта е 1079 броя.
По този пример е очевидно, че не знаем абсолютното местоположение на обекта, просто знаем, че броя на пътуванията от входа до изхода е 1079.
Това не ни казва, че обектът е на три инча от изхода, просто влиза и т.н.
ние просто знаем, че обектът ще влезе, ще бъде уловен брой, а обектът ще излезе и отново ще бъде уловен.
В случай, че не видяхме обект да излиза в рамките на допустимия брой на пътуване плюс или минус мъртва лента, машината ще се повреди и процесът ще спре.
Има много, много вариации на енкодера там и бихме могли да продължим с часове за различните типове.
Да се надяваме, ние ви дадохме основно разбиране за това какво е там и кога може да искате да изберете един конкретен тип над другия.
